
少量多品種に対応し、「後付けハンダ」のタクトタイムを大幅に短縮
ガーバーデータ・部品実装情報を元にはんだ付けプロファイルを簡単・スピード生成が可能。
作成した情報を元にロボットはんだ付けが行え、自動はんだ付けのプログラム作成時間の大幅短縮が可能です。
作成した情報を元にロボットはんだ付けが行え、自動はんだ付けのプログラム作成時間の大幅短縮が可能です。
主な特長
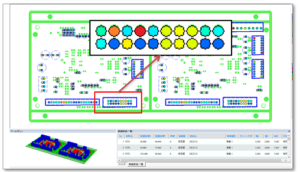
設計データ基準でピン毎のはんだ付けプロファイルを自動設定
ガーバーデータ・部品情報・部品配置座標などのCADから出力される実装基板情報全てをデータベース化、接続するネットから銅箔面積を抽出します。またピン径、はんだ材料・メーカー方向の情報を加えることによりはんだ付けプロファイルを自動設定を行えます。
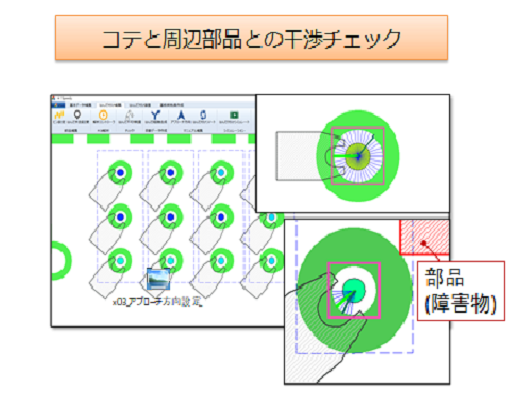
はんだ付けデータチェック
ソフトウェア上ではんだゴテが周辺部品に干渉しないように干渉チェックを行います。コテの方向をコントロールします。また、はんだ付けを行う最適なルートをソートし、事前シミュレーションが可能です。

受け治具用3Dデータ生成
3Dプリンター等での受治具作成で必要となる3Dデータ(STL)を自動生成可能
ロボット仕様
| 型名 | SP3039 |
|---|---|
| 駆動方式 | パルスモータ |
| 制御軸数 | 5軸同時制御 |
| ワークサイズ(XY) | 300×390mm |
| Z軸ストローク | 100mm |
| コテ先回転角度(R) | 360度 |
| コテ先クリーニング | エアーブロー方式 |
| ヒーター設定温度 | 150~450℃ |
| ヒーター容量 | 130/260/390Wより選択 |
| 糸はんだ線径 | 0.3~1.2mm |
| エアー | ドライヤー 0.5Mpa |
| 外形(W×D×H) | 570x635x830mm |
| 重量 | 45Kg |